郑州批发机电伊明牌BH150A-L2-30-B1-D1-S7数控步进减速机
文章来源:ymcdkj
发布时间:2024-05-05 18:23:55
郑州机电:伊明牌BH150A-L2-30-B1-D1-S7数控步进减速机
对于多合一的逃生锤,和手电差不多的握法,但要特别注意的是要握在逃生锤应急的位置,即锤子的 面,这样在敲击玻璃时才能用上劲。当拿到逃生锤了却发现被安全带无法像往常一样打,这时就能用上多功能逃生锤里的应急断绳了,要快速的把安全带割断,再去敲碎玻璃。用逃生锤敲击玻璃时,用力要均匀,不能用蛮劲。逃生锤很小巧,敲碎玻璃不是靠力量,而是用巧劲。逃生锤的尖头是相当尖的,在敲击时用巧劲多敲击几次。
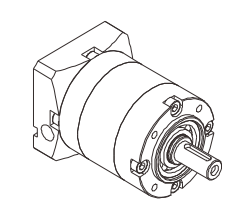
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
由于利用内啮合和几个行星轮分担传递载荷,行星减速机具有结构紧凑,体积小重量轻,背隙小、精度较高,传动比大,使用寿命很长等优点,额定输出扭矩可以的很大。而且价格适中。有直齿和斜齿两种。
以下用一个两极传动的行星齿轮箱来介绍其原理,旋转的输入小齿轮带动与之啮合的3个行星齿轮进行公转运动。而其公转运动,通过行星轴传至前段支架。此时,前段支架的旋转方向与输入旋转相同。与前段支架相连的后段小齿轮成为后段减速部的输入,与前段减速部相同,带动后段行星齿轮进行公转运动。而其公转运动传至用输出轴承支撑的后段支架再输出。由此可见,输出轴和输入轴同轴而且转向也相同。
通常生产厂家会回避单级速比过大,原因是大速比下行星减速机能输出的扭矩明显小于同级的较小减速比。而这是由减速机本身结构引起的,可以很清楚看出,减速比为10的时候,中心太阳轮的直径比同级的其他减速比小得多,当然能输出的扭矩也小得多。
在工程实际中,应用 为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。它结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到的数学模型时,控制理论的 其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术 为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、 积分、微分计算出控制量进行控制的。 比例控制(P)是一种 简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 在积分(I)控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的 或简称有差系统(System with Steady-state Error)。